Project
Vision.
The H2020-ICT10 project SOPHIA – Socio-physical Interaction Skills for Cooperative Human-Robot Systems in Agile Production – aims to create a new generation of core robotic technologies for socially cooperative human-robot systems. The objectives are to achieve a reconfigurable and resource-efficient production and improve human comfort and trust in automation, in hybrid human-plus-robot manufacturing environments.
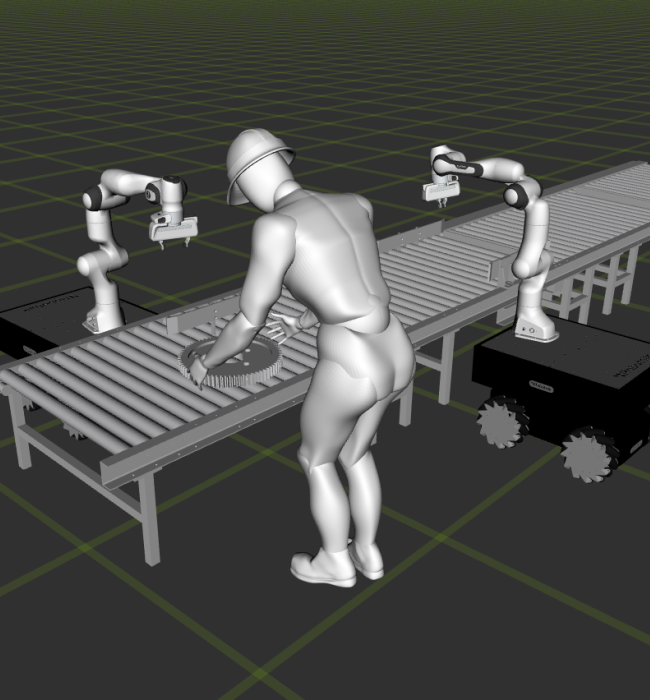
SOPHIA core intelligence will enable timely, natural, and human-in-command interactions between humans and robots on both social (e.g., geometric reasoning and situation assessment; knowledge models for human-robot mixed teams; natural and multi-modal dialogue; and human-aware task planning) and physical (e.g., sharing physical loads) levels, representing the new concept of socio-physical interaction. Additionally, the design and development of novel under-actuated wearable exoskeletons and collaborative robots with high payload and advanced loco-manipulation capacities are central to the mechatronics developments of the SOPHIA project.
SOPHIA has a clear focus on standardization of its advanced technologies at a European level. It includes a large network of Digital Innovation Hubs for agile manufacturing (Trinity, DIH2, Flanders Make, DIH Umbria) and healthcare (DIHero) to ensure that its core technologies are “compliant by design” to standards in the field of human-robot interaction and collaboration.
Impact.
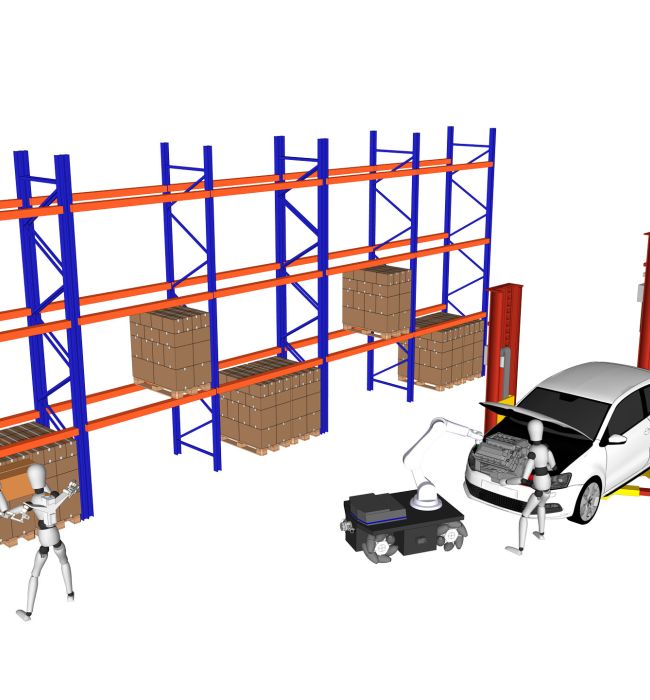
SOPHIA targets socio-physically adaptive, ergonomic, and reconfigurable production systems that are accessible and understandable by everyone. Such systems are built on the basis of human work processes backed by decision support tools, assistive and interactive robots and smart self-adapting workplace automation. All are combined into European agile and human-centred manufacturing. Other expected impacts of the project are:
-
Modular and reusable core technologies for cooperative robotic systems
-
Enabling a greater range of applications, from manufacturing to services and healthcare
-
Contributing to the creation of productive jobs regardless of ageing and gender
-
Contributing to the realisation of dynamically reconfigurable factories capable of low-volume/high-mix production in an economically viable way
-
Social sustainability by enhancing human workers’ cognitive and supervisory role for the benefit of task execution efficiency, production quality, and human achievements
-
Refining standards for ergonomics and workplace safety